

mjbots
qdd100 beta 3 developer kit
qdd100 beta 3 developer kit
Out of stock
Couldn't load pickup availability
NOT CURRENTLY STOCKED
This is the beta kit for the mjbots qdd100 quasi-direct drive brushless servo (also available for purchase separately).
Specifications:
- Torque, measured at zero speed, ambient 20C lab, 24V input, no airflow or heatsink until limiting occurs
- Peak: 16 Nm (< 1s)
- 10 Nm - 60s
- 6 Nm - 400s
- 3.3 Nm - Indefinite
- Peak speed: 3,600 dps @ 36V -- 2,300 dps @ 24V
- Backlash: +- 0.25 degrees
- Weight: 507g
- Control rate: 15-30kHz
- Mechanical - 2D CAD drawing - 3D STEP File
- Outer diameter: 100mm
- Thickness: 44mm
- M3 fixed mounting bolt pattern on front and back
- M3/M4 mounting bolt pattern on output
- Voltage input: 10-44V
- Peak power: 500W
- Communication: 5Mbps CAN-FD
- Power connector: 2x XT-30
- Data connector: 2x JST PH-3
- Open source motor driver and firmware with programming port and CAN bootloader: https://github.com/mjbots/moteus
In addition, this is a developer kit that includes everything you need to power up and operate the device:
- 24V power supply with XT30 connector
-
mjcanfd-usb-1x w/ USB cable (product photo may show a fdcanusb, but the mjcanfd-usb-1x is what is included)
-
JST PH-3 cable for CAN communication
- Spare XT30 and JST PH-3 connectors
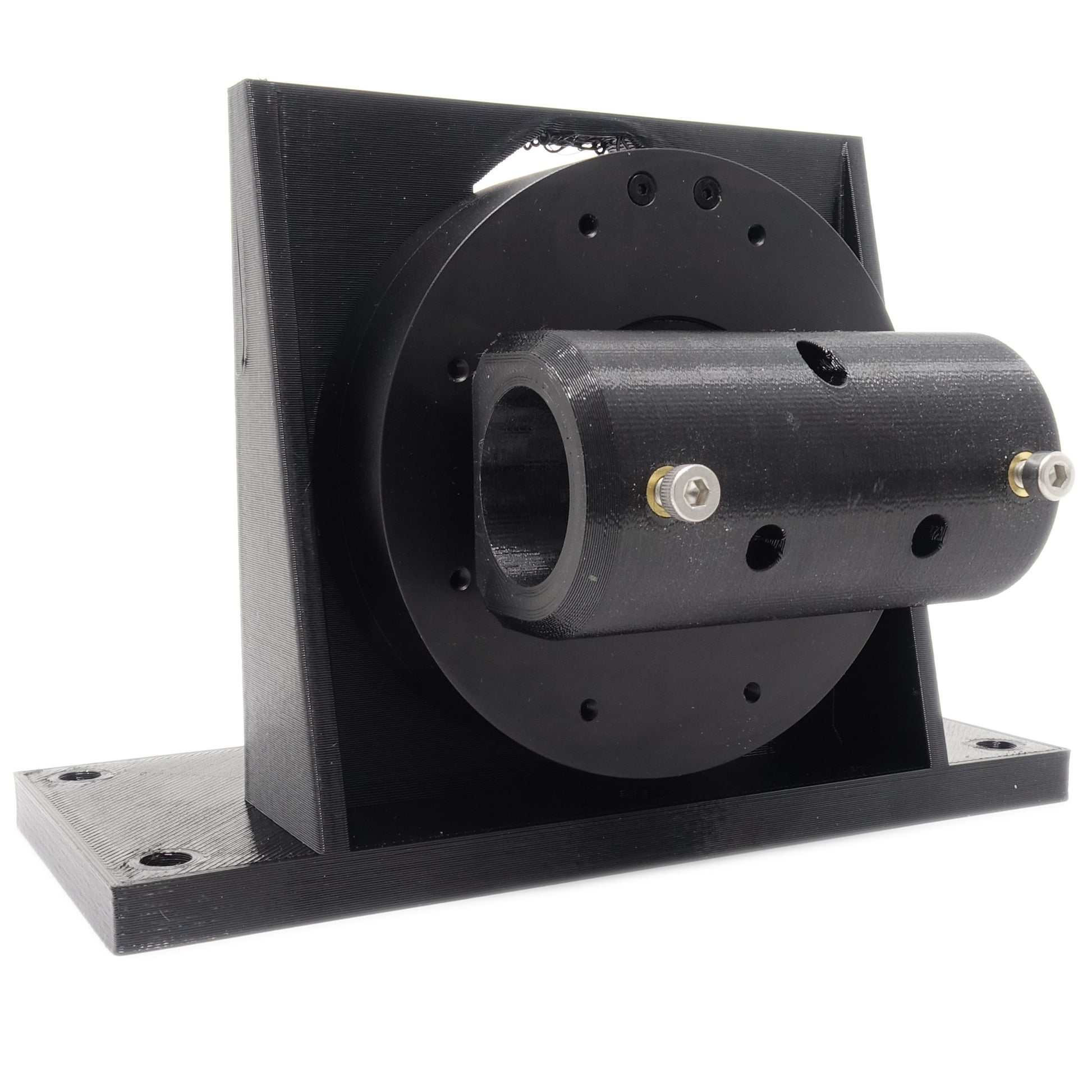
- Brackets and bolts for mounting to a table and a demonstration output "horn" with hole for 1 inch tube
- USB STM32 programmer w/ moteus JST-ZH6 connector
Accessories:
- Daisy chain CAN-FD wiring: JST PH3 cables / Termination resistors
The servo is available standalone at: https://mjbots.com/product/qdd100-beta-3/
Documentation:
Support / questions:
NOTE: This is a BETA product. There will be rough edges, possibly lots of them. The documentation isn’t great / is non-existent, the firmware has not seen wide use, and the hardware may be unreliable. You’re OK with that, and don’t mind providing feedback on how the servo works and how it could be improved.
That said, there is still a 1 year warranty for manufacturing defects as for all mjbots products.
Share


